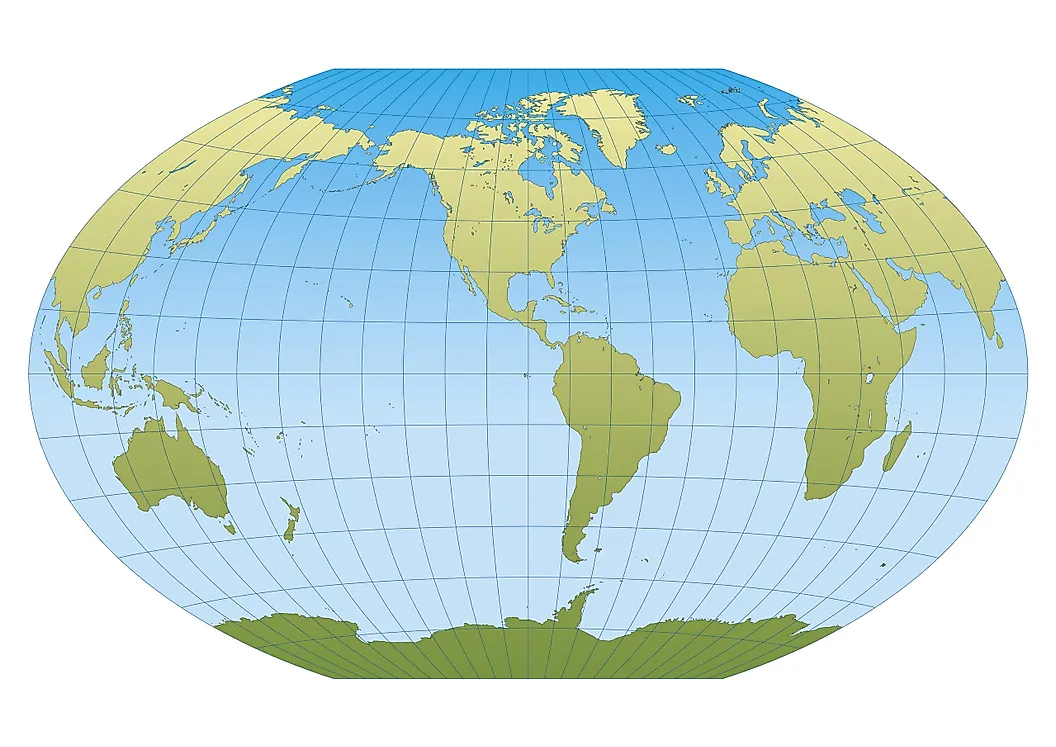
World Map - Robinson Projection
A map projection is a cartographic technique used to show the Earth’s three-dimensional surface in two dimensions. There are different types of map projections including Mercator, Dymaxion, Gall-Peters, AutherGraph, and Robinson. The Robinson projection is a commonly used world map cylindrical projection. This map projection, also known as a compromise, presents an entire view of the globe’s surface at once. Unlike most map projections, the Robinson projection is neither constructed using any mathematical formula nor drawn to scale and was constructed to show a pleasing image of the entire globe.
Origin
The Robinson projection was created in 1963 by Arthur H. Robinson upon a request by Rand McNally, a commercial atlas publishing company. Robinson used computer-assisted trial and error to develop a table of transformation parameters. The details of the projection’s construction were released 11 years after the map projection was devised. The National Geographic Society used the Robinson Map Projection between 1988 and 1998, after which it adopted the Winkel tripel projection.
Usage
The Robinson Projection is meant to show thematic data and is not to be used in area or distance measurement. Thus, it is commonly recommended as one of the best “compromise” map projections for most thematic maps. The CIA Word Factbook commonly uses the projection in its physical and political world maps.
Distortions

The Robinson map projection is not drawn to scale. Although the Robinson Projection is not free from distortions, and the most severe distortions are near the poles. However, distortions near the outer parallels at high latitudes are common on most pseudo-cylindrical map projections. The distortions become less objectionable moving away from the poles. The projection also distorts distance, area, shapes, and direction. Area changes with latitude and not longitude, with severe exaggerations at high latitudes.